

| MAS ETH ARCH/CAAD - 2004/05 - STUDENT PAGES
Master of Advanced Studies in Architecture, Specialization in Computer Aided Architectural Design | 065-0005/6
Supervision: Prof. Dr. Ludger Hovestadt, Philipp Schaerer
Chair of CAAD, ETH Zurich
/ milling / assignment02 / task / proposal:statements / proposal:thesis / first sketches / modelling + scripting / milling
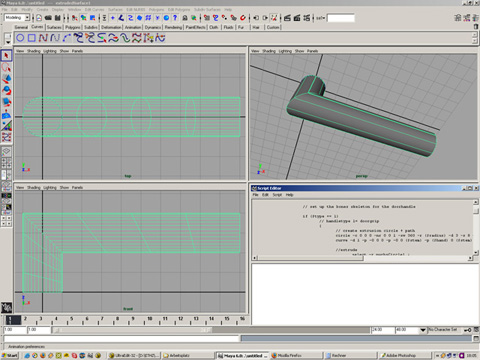
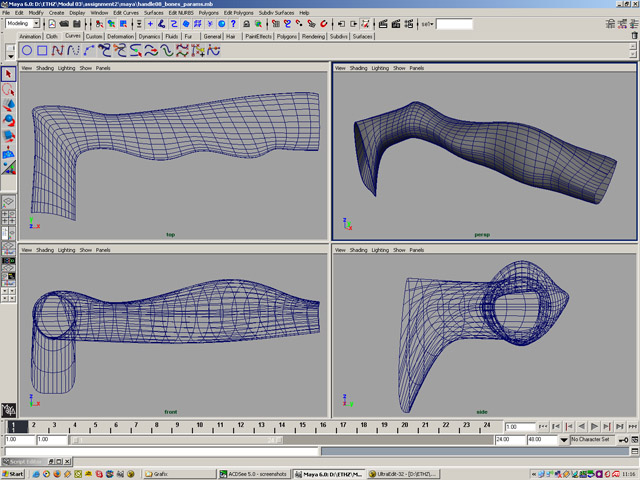
// modelling approach in MAYA
- // the first parameter: usage and architectural context:
setting up the skeleton for different handletypes
creation of four descibing curves after parameters of stemlength, grip volume and grip length, -- -- -- --> view the script: * script egrip.TXT:
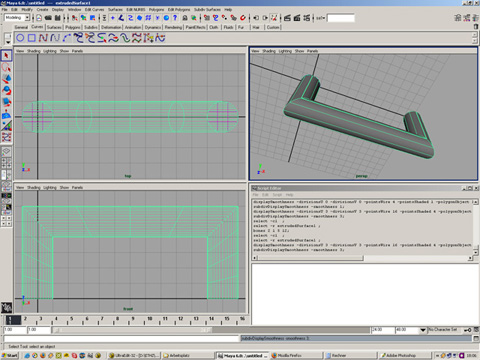
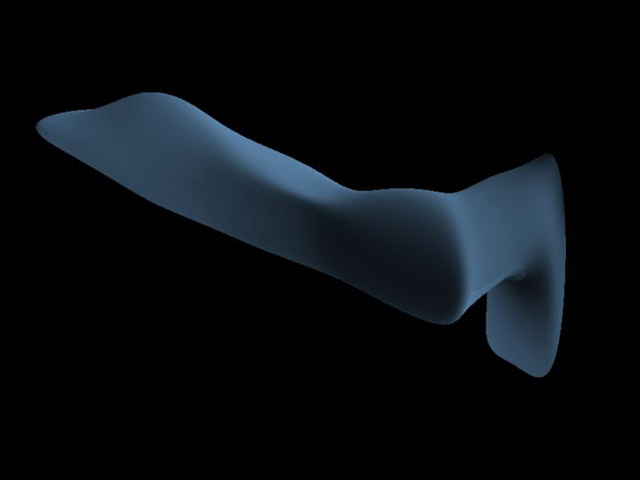
- // the second paramter: ergonomic and user specific or:
otl aichers four principles of gripping programmed...
- ergonomic parameters on values for: fingers, thumbrest, palm and volume curvature .
paramters modify the skin using only sine and cosine functions to generate smooth curvature
the problem: the border between a design and organic wobble is pretty small
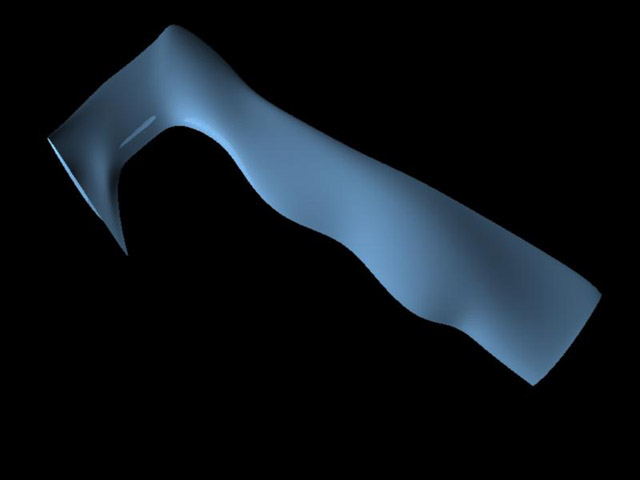
different parameters generate very different instances -- -- -- --> view the script:* script egrip.TXT:
- render output
- render ouput
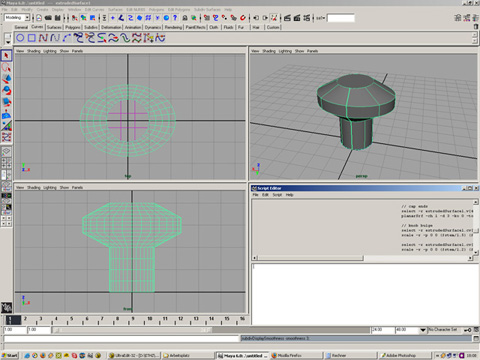
- // the third paramter:procedures create surface patterns to supply tactile information and haptic qualities -- -- -- --> view the script: * script egrip.TXT:
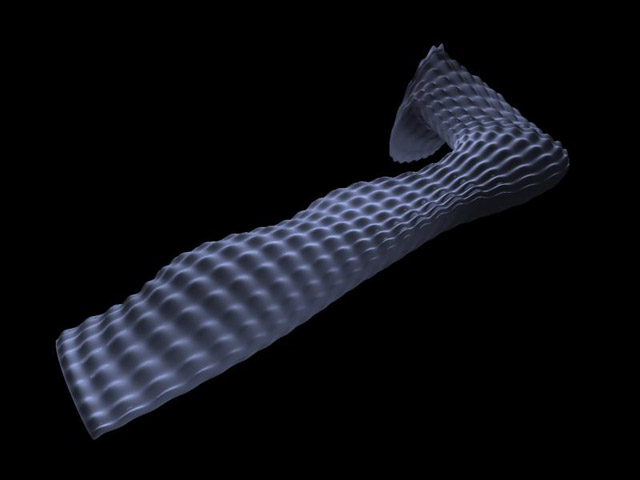
- examples are: braille for blind people, engraved room information
- tactile structure to describe room usage: e.g. for laboraty, office, private within big anonymus buildings
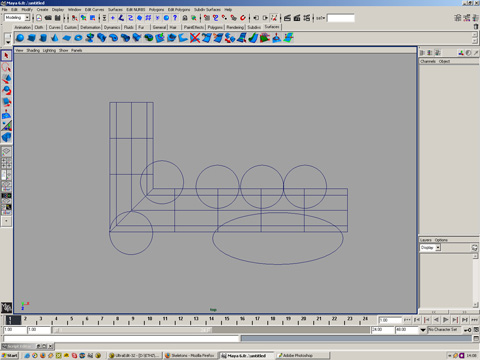
- // 27-01-04 achieved so far
/ parameter based creation of the handle skeleton for one handletype
/ parameter based curvature modification by applying tigonemetric functions on skin vertexes, adjusting the geometry to chosen ergonomic desires
/ first example of skin structure / ornament / haptics
/ setup of the milling process of two-sided milling in wood
- // how to continue:
/ get the skeleton system to create a wide range of handletypes
/ better definition of the design / finetuning
/ incorporate more surface patterns: info_structure, braille, ornament
|
