Advanced Autonomous Mobile Robot
After our first robot experience, we tried to build an improved one. With better
spare parts/engineering and a sophisticated sensor/actuator balance.
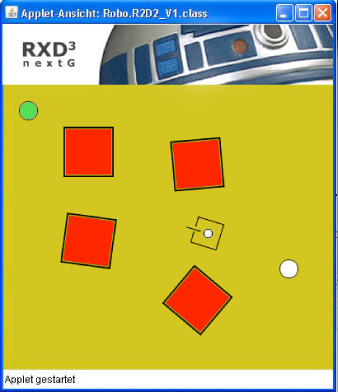
The main idea was to program an infrared camera localization system with a wide angle lens and three leds on the top of the mobile robot. In that way
we know exactly the position, rotation and speed of the robot within 2x2 square meters.
Another advantage was that we could detect dynamic obstacles within the area.
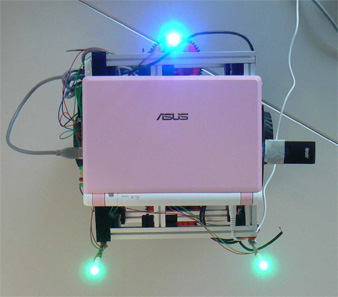 Robot top view | 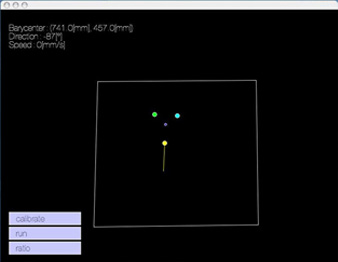 Robot inSight software view / localization software |
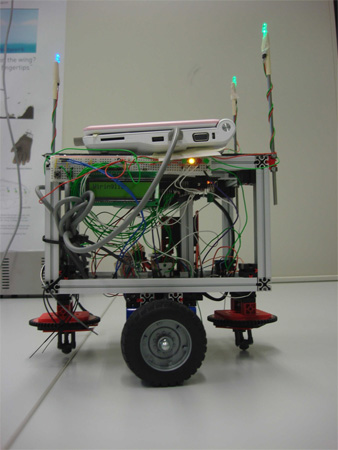 Robot side view |  Localization system with mounted camera on the ceiling |
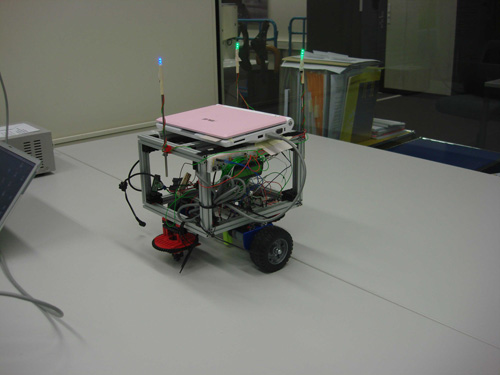 Robot perspective view |  Robot side view |
Path-finding and movement control software
by Christoph Wartmann
Assistants: Etienne Ribeiro, Philipp Dohmen, Steve Galley