Student impressions: MAS 2009/10 Physical Computing course
Content: Hands on electronics by building Braitenberg Vehicles
This course is basically designed as an 6-8 week intense workshop for our Master of Advanced Studies program, in the field of Computer Aided Architectur Design (CAAD). As an extension to our programming workshops on agent based systems, behaviors and parametric design programming with processing, this course should enhance student's knowledge to interact with the 'real world' by using all possibilities of information technology, applied to the field of architecture.
The following exercise is used to learn the basics of electronics and microcontroller programming. As well as to implement agent based behaviors to real machines and not virtual pixel.
If you want to know more about our international 'Master of Advanced Studies' program , just click -> here
Host: Christoph Wartmann : wartmann{at}arch.ethz.ch
Documentation Dino Rossi
As an introduction to Physical Computing we are hacking RP5 Tracked Chassis using Seeeduino v12.2 Arduino boards.
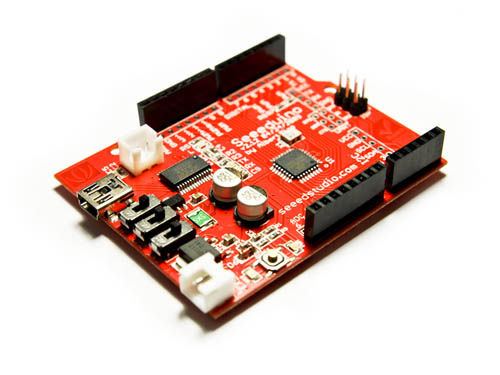 Seeeduino v12.2. |  RP5 Tracked Chassis. |
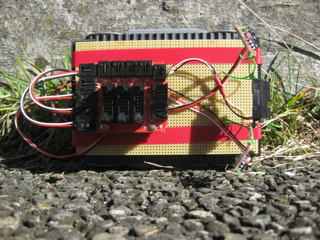
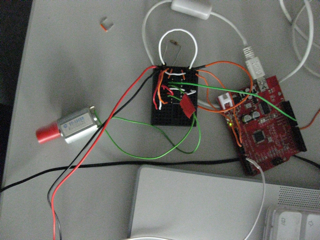 Breadboard motor driver prototype. | 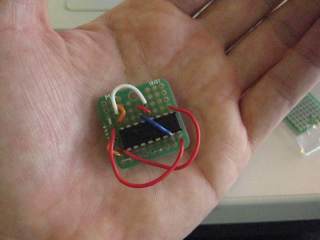 Second generation motor driver prototype. |
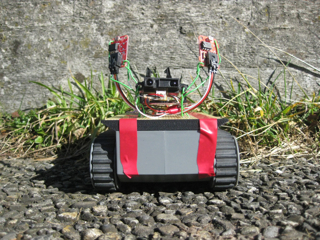
 First vehicles with motor drivers installed. |
First test drive of vehicles.
Light sensor based Braitenberg Vehicle finds its way
out of the darkness and into the light...
 :: |  :: |
 :: | 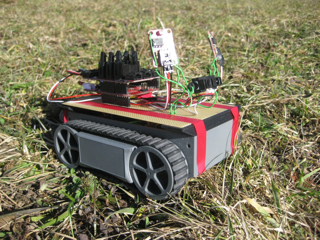 Into the wild... |
Braitenberg vehicle uses an IR sensor to
back away from a dangerous situation...
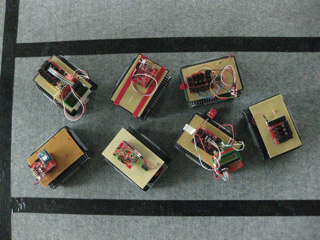
A cluster of braitenberg vehicles forms...
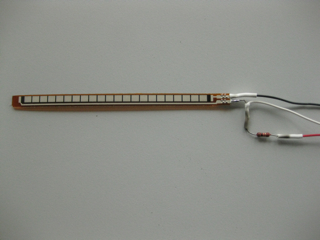 Flex sensor. | 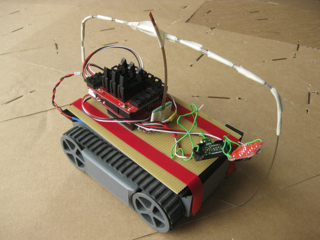 Braitenberg vehicle with bump detection. |
 And now, on to wireless communication via XBee... | 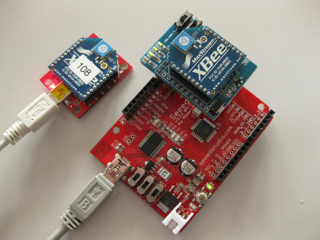 First serial communication between two XBees via usb. |
After a short intro to XBee we managed to get wireless control
over our vehicle through the Arduino serial monitor.
Clearly there is room for improvement...
More coming soon...