Mobile Robot Experiences
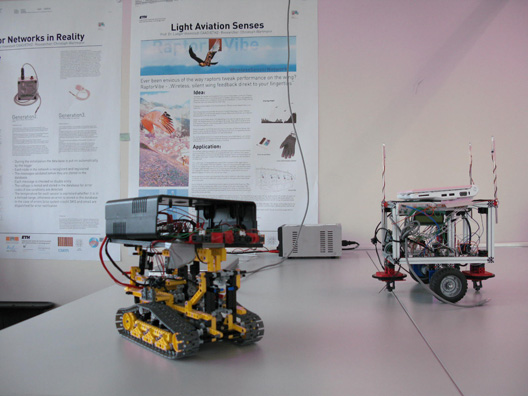
In the first version we built our own Lego robot with the capability
to control it via the internet. We were able to let it drive through the
campus building and communicate with people via a microphone/speaker and a cam.
Some of them were very surprised to talk to a 'robot'.
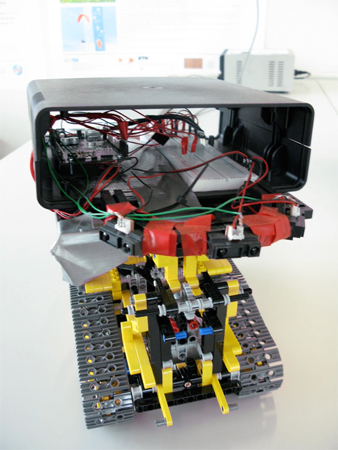
In the second version we've tried to let it drive autonomously with three
infrared sensors attached to it. After calibrating sensors and motors to one
package, we tried to use it as a floor-plan painter. But, due to many cumulated
odometry and poor hardware errors it was not possible to generate it in this way.
However, it was a lot of fun and we've learned so much about sensors and actuators.
Feel free to watch our RoboLobo movie.
Downloadlink:
http://www.processing.arch.ethz.ch/pmwiki/uploads/Projects/Robolobo/LoboMovie2.divx
 Working on the 2nd Prototype. |  EmbeddedLab in action. |
2nd version - with infrared sensors, autonomously driven.
by Christoph Wartmann, Philipp Dohmen