Examples - Sensorboard - StepMotor
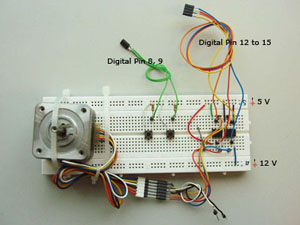
Step Motor
This Example shows the use of a Step Motor.

/**************************************************************************************************
*
* Step Motor
*
* Version: 1.0.0 - Januar 2009
* Author: Etienne Ribeiro / tutorial assistant caad / eribeiro[at]ethz.ch
* Supervisor: Christoph Wartmann / chair for caad - ETH Zürich / wartmann[at].arch.ethz.ch
*
* Desc: Shows the use of a Step Motor on digital pin.
*
***************************************************************************************************/
// Const
static int digitalButtonPin[] = {8, 9};
static int digitalOutPin[] = {12, 13, 14, 15};
static boolean enableSerial = false;
// Setup
void setup()
{
pinMode(48, OUTPUT);
digitalWrite(48, HIGH);
delay(200);
digitalWrite(48, LOW);
delay(200);
digitalWrite(48, HIGH);
// Serial
if (enableSerial == true) Serial.begin(9600);
// pinMode
pinMode(digitalButtonPin[0], INPUT);
pinMode(digitalButtonPin[1], INPUT);
for (int i=0; i<3; i++) {
pinMode(i, OUTPUT);
}
}
// Loop
void loop()
{
// Foreward
if (digitalRead(digitalButtonPin[0]) == LOW) {
if (enableSerial == true)
Serial.println(" Stepmotor forward");
stepforward();
}
// Backward
if (digitalRead(digitalButtonPin[1]) == LOW) {
if (enableSerial == true)
Serial.println(" Stepmotor backward");
stepbackward();
}
// Serial
if (enableSerial == true) {
Serial.print(" Stepmotor ");
Serial.println("");
}
}
// Stepforward
void stepforward() {
digitalWrite(digitalOutPin[0], HIGH);
digitalWrite(digitalOutPin[1], LOW);
digitalWrite(digitalOutPin[2], LOW);
digitalWrite(digitalOutPin[3], LOW);
delay(30);
digitalWrite(digitalOutPin[0], LOW);
digitalWrite(digitalOutPin[1], HIGH);
digitalWrite(digitalOutPin[2], LOW);
digitalWrite(digitalOutPin[3], LOW);
delay(30);
digitalWrite(digitalOutPin[0], LOW);
digitalWrite(digitalOutPin[1], LOW);
digitalWrite(digitalOutPin[2], HIGH);
digitalWrite(digitalOutPin[3], LOW);
delay(30);
digitalWrite(digitalOutPin[0], LOW);
digitalWrite(digitalOutPin[1], LOW);
digitalWrite(digitalOutPin[2], LOW);
digitalWrite(digitalOutPin[3], HIGH);
delay(30);
}
// Stepbackward
void stepbackward() {
digitalWrite(digitalOutPin[0], LOW);
digitalWrite(digitalOutPin[1], LOW);
digitalWrite(digitalOutPin[2], LOW);
digitalWrite(digitalOutPin[3], HIGH);
delay(30);
digitalWrite(digitalOutPin[0], LOW);
digitalWrite(digitalOutPin[1], LOW);
digitalWrite(digitalOutPin[2], HIGH);
digitalWrite(digitalOutPin[3], LOW);
delay(30);
digitalWrite(digitalOutPin[0], LOW);
digitalWrite(digitalOutPin[1], HIGH);
digitalWrite(digitalOutPin[2], LOW);
digitalWrite(digitalOutPin[3], LOW);
delay(30);
digitalWrite(digitalOutPin[0], HIGH);
digitalWrite(digitalOutPin[1], LOW);
digitalWrite(digitalOutPin[2], LOW);
digitalWrite(digitalOutPin[3], LOW);
delay(30);
}