Examples - Modules - Accelerator LIS302
Acceleration Sensor LIS302DL
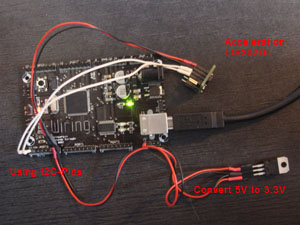
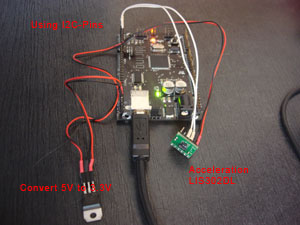
This Module can be used to plug an Acceleration Sensor LIS302DL into your project. Connect your sensors to I2C-Pins on your Board (Pin 0 and 1 on Wiring-Board). SCL- and SDA-Pins are not crossed so connect SCL to SCL and SDA to SDA.
Download the source file
Table of contents
(top)
Source - modLIS302DL
/**************************************************************************************************
*
* Accelerator LIS302DL - Module
*
* Version: 1.0.0 - Januar 2009
* Author: Christoph Wartmann / chair for caad - ETH Zürich / wartmann[at].arch.ethz.ch
* Etienne Ribeiro / tutorial assistant caad / eribeiro[at]ethz.ch
* (Based on code from BEN GATTI)
*
* Desc: Module to plug an LIS302DL Accelerator Sensor to your porjects. This Module makes
* it easy to run LIS302DL Accelerator in either +-2g or +- 8g mode.
*
* Pins: VCC: 3.3V
* GND
* SCL: to Pin 0 (SCL)
* MOSI: to Pin 1 (SDA)
*
* Protocol: I2C
*
* Not yet implemented:
* - interrepts
* - click and double click recognition
* - high pass filter
* - SPI Interface
* - Self Test
*
* Methodes: void LIS302_iniWire()
* Initialize Wire. Must be called at startup.
* boolean LIS302_AppendSensor ()
* Append Sensor (using +-2g Mode).
* boolean LIS302_AppendSensor (boolean use8g)
* Append Sensor.
* Using +-2g or +-8g Mode
* void LIS302_ConfigR1 (boolean dataRate400Hz, boolean powerUp, boolean use8g, boolean enableSelfTestP, boolean enableSelfTestM, boolean enableZ, boolean enableY, boolean enableX)
* Configuration Register 1. See Datasheet if you want to change any settings.
* void LIS302_ConfigR2 (boolean useSPI3WireMode, boolean rebootMemory, boolean enabledFilteredData, boolean enableFreeFallAndWakeUp02, boolean enableFreeFallAndWakeUp01, byte highPassFrequency)
* Configuration Register 2. See Datasheet if you want to change any settings.
* void LIS302_ConfigR3 (boolean interruptActiveLow, boolean interreptOpenDrain, byte int2ControlBits, byte int1ControlBits)
* Configuration Register 3. See Datasheet if you want to change any settings.
* byte LIS302_Read(char which)
* Read values
* 'x', 'y', 'z': Acceleration
* 's': Current state of Sensor
* 'a', 'b', 'c': Get Configuration
* 'w': Get whoAmI. should be 3B
* int LIS302_ParseToG (int val)
* Parse value to G. Call val = LIS3L_Read('x') and LIS3L_ParseToG(val).
* void LIS302_PrintState (byte state)
* Print current state of your sensor to command line. Call state = LIS3L_Read ('s') and LIS3L_PrintState(state)
*
*
*
* TWI (I2C) sketch to communicate with the LIS302DL accelerometer - Modified and tested Ben Gatti - 6/9/2008
* http://www.st.com/stonline/products/literature/ds/12726.pdf
* Note 5.6K pullup resister on data lines.
* Device is 3 volt was tested at 5 volts no level shifting.
* Reference claims 6 volts is pin max.
*
* Modified from // TWI (I2C) sketch to communicate with the LIS302V02DQ accelerometer
* http://www.nearfuturelaboratory.com/2007/01/11/arduino-and-twi/
* Modified code from http://research.techkwondo.com/blog/julian/279
* Thanks Julian.
*
***************************************************************************************************/
#include <TwoWire.h>
//
// Const
//
#define whoAmI 0x0F
#define reg1 0x20
#define reg2 0x21
#define reg3 0x22
#define stateReg 0x27
#define outXhigh 0x29
#define outYhigh 0x2B
#define outZhigh 0x2D
//
#define LIS302_i2cID 0x1D // 0x1C (Pin 12 must be LOW) or 0x1D (Pin 12 must be HIGH)
#define LIS302_id 59 // 0x3B
#define LIS302_2g_factor 18 // Divide value from register with this value to get 'g'
#define LIS302_8g_factor 72 // Divide value from register with this value to get 'g'
//
// Var
boolean LIS302_2g_mode = true;
//
// iniWire
void LIS302_iniWire() {
Wire.begin(); // join i2c bus (address optional for master)
}
boolean LIS302_AppendSensor () {
LIS302_AppendSensor (false); // +-2g
}
boolean LIS302_AppendSensor (boolean use8g) {
// Config Device
boolean powerup = true;
LIS302_ConfigR1 (false, powerup, use8g, false, false, true, true, true); // power up, use8g
LIS302_ConfigR2 (false, false, false, false, false, 0);
LIS302_ConfigR3 (false, false, 0, 0);
// query the WHO_AM_I register of the LIS302DL
// this should return 0x3B, a factory setting
byte val = LIS302_Read ('w');
if (val != LIS302_id)
return false;
// Return
return true;
}
//
// LIS302_ConfigR1
// default: false, false, false, false, false, true, true, true
void LIS302_ConfigR1 (boolean dataRate400Hz, boolean powerUp, boolean use8g, boolean enableSelfTestP, boolean enableSelfTestM, boolean enableZ, boolean enableY, boolean enableX) {
byte cmd = B00000000;
if (dataRate400Hz) // switch data rate for mesurement between 100Hz (default) and 400Hz
cmd |= B10000000;
if (powerUp) // power up/down the device
cmd |= B01000000;
if (use8g) { // switch between +-2g and +-8g mode
cmd |= B00100000;
LIS302_2g_mode = false;
} else {
LIS302_2g_mode = true;
}
if (enableSelfTestP) // enable selftest P
cmd |= B00010000;
if (enableSelfTestM) // enable selftest M
cmd |= B00001000;
if (enableZ) // enable Z
cmd |= B00000100;
if (enableY) // enable Y
cmd |= B00000010;
if (enableX) // enable X
cmd |= B00000001;
// Send command
Wire.beginTransmission(LIS302_i2cID);
Wire.send(reg1); //
Wire.send(cmd);
Wire.endTransmission();
}
//
// LIS302_ConfigR2
// default: false, false, false, false, false, 0
void LIS302_ConfigR2 (boolean useSPI3WireMode, boolean rebootMemory, boolean enabledFilteredData, boolean enableFreeFallAndWakeUp02, boolean enableFreeFallAndWakeUp01, byte highPassFrequency) {
byte cmd = B00000000;
if (useSPI3WireMode) // if using SPI-Protocoll (not I2C) you can switch between 4-wire (default) and 3-wire mode
cmd |= B10000000;
if (rebootMemory) // Reboot Memory (Reload Registers from flash memory, same is done at power up)
cmd |= B01000000;
if (enabledFilteredData) // enable high pass filter in the signal chain of the sensor
cmd |= B00010000;
if (enableFreeFallAndWakeUp02) // High Pass filter enabled for FreeFall/WakeUp # 2.
cmd |= B00001000;
if (enableFreeFallAndWakeUp01) // High Pass filter enabled for FreeFall/WakeUp # 1.
cmd |= B00000100;
if (highPassFrequency == 0) // 2Hz (if dataRate = 100Hz) / 8Hz (if dataRate = 400Hz) (default)
cmd |= B00000000;
if (highPassFrequency == 1) // 1Hz (if dataRate = 100Hz) / 4Hz (if dataRate = 400Hz)
cmd |= B00000001;
if (highPassFrequency == 2) // 0.5Hz (if dataRate = 100Hz) / 2Hz (if dataRate = 400Hz) (default)
cmd |= B00000010;
if (highPassFrequency == 3) // 0.25Hz (if dataRate = 100Hz) / 1Hz (if dataRate = 400Hz) (default)
cmd |= B00000011;
// Send command
Wire.beginTransmission(LIS302_i2cID);
Wire.send(reg2); //
Wire.send(cmd);
Wire.endTransmission();
}
//
// LIS302_ConfigR3
// default: false, false, 0, 0
void LIS302_ConfigR3 (boolean interruptActiveLow, boolean interreptOpenDrain, byte int2ControlBits, byte int1ControlBits) {
byte cmd = B00000000;
if (interruptActiveLow) // interrupt is active if HIGH (default) or LOW
cmd |= B10000000;
if (interreptOpenDrain) // Push-pull (default) /Open Drain selection on interrupt pad
cmd |= B01000000;
if (int2ControlBits == 0) // Int2 Pad = GND (default)
cmd |= B00000000;
if (int2ControlBits == 1) // Int2 Pad = FF_WU_1
cmd |= B00001000;
if (int2ControlBits == 2) // Int2 Pad = FF_WU_2
cmd |= B00010000;
if (int2ControlBits == 3) // Int2 Pad = FF_WU_1 or FF_WU_2
cmd |= B00011000;
if (int2ControlBits == 4) // Int2 Pad = Data ready
cmd |= B00100000;
if (int2ControlBits == 5) // Int2 Pad = Click interrupt
cmd |= B00111000;
if (int1ControlBits == 0) // Int1 Pad = GND (default)
cmd |= B00000000;
if (int1ControlBits == 1) // Int1 Pad = FF_WU_1
cmd |= B00000001;
if (int1ControlBits == 2) // Int1 Pad = FF_WU_2
cmd |= B00000010;
if (int1ControlBits == 3) // Int1 Pad = FF_WU_1 or FF_WU_2
cmd |= B00000011;
if (int1ControlBits == 4) // Int1 Pad = Data ready
cmd |= B00000100;
if (int1ControlBits == 5) // Int1 Pad = Click interrupt
cmd |= B00000111;
// Send command
Wire.beginTransmission(LIS302_i2cID);
Wire.send(reg3); //
Wire.send(cmd);
Wire.endTransmission();
}
//
// Read
// 'x', 'y', 'z', 's'->state, 'w'->whoAmI (8 Bit Dummie Identification for LIS302DL), 'a'->config Reg1, 'b'->config Reg2, 'c'->config Reg3
byte LIS302_Read(char which) {
// Send register you want to read from
Wire.beginTransmission(LIS302_i2cID);
switch(which) {
case 'x':
case 'X':
Wire.send(outXhigh);
break;
case 'y':
case 'Y':
Wire.send(outYhigh);
break;
case 'z':
case 'Z':
Wire.send(outZhigh);
break;
case 's':
case 'S':
Wire.send(stateReg);
break;
case 'w':
case 'W':
Wire.send(whoAmI);
break;
case 'a':
case 'A':
Wire.send(reg1);
break;
case 'b':
case 'B':
Wire.send(reg2);
break;
case 'c':
case 'C':
Wire.send(reg3);
break;
default:
Wire.endTransmission();
return 0;
break;
}
Wire.endTransmission();
// Read command
Wire.requestFrom(LIS302_i2cID, 1);
// return
while(!Wire.available())
delay(10);
return Wire.receive();
}
//
// LIS302_ParseToG
// Parse Values from Register to mG
int LIS302_ParseToG (int val) {
long tmpval = val;
if (LIS302_2g_mode)
return tmpval * 1000 / LIS302_2g_factor;
return tmpval * 1000 / LIS302_8g_factor;
}
void LIS302_PrintState (byte state) {
Serial.print("Status: ");
Serial.print(state, BIN);
Serial.print(": ");
if (int(1<<7 & state) != 0) // byte 1000 0000
Serial.print (" data over written!");
if (int(1<<6 & state) != 0) // byte 0100 0000
Serial.print (" data over written by Z!");
if (int(1<<5 & state) != 0) // byte 0010 0000
Serial.print (" data over written by Y!");
if (int(1<<4 & state) != 0) // byte 0001 0000
Serial.print (" data over written by X!");
if (int(1<<3 & state) != 0) // byte 0000 1000
Serial.print (" new data available!");
if (int(1<<2 & state) != 0) // byte 0000 0100
Serial.print (" new data available for Z!");
if (int(1<<1 & state) != 0) // byte 0000 0010
Serial.print (" new data available for X!");
if (int(1<<0 & state) != 0) // byte 0000 0001
Serial.print (" new data available for Y!");
}
(top)
Source - Main
/**************************************************************************************************
*
* Accelerator LIS302DL
*
* Version: 1.0.0 - Januar 2009
* Author: Christoph Wartmann / chair for caad - ETH Zürich / wartmann[at].arch.ethz.ch
* Etienne Ribeiro / tutorial assistant caad / eribeiro[at]ethz.ch
* (Based on code from BEN GATTI)
*
* Desc: Shows the use of an LIS302DL Accelerator Sensor using I2C-Protocoll.
*
***************************************************************************************************/
//
// Setup
void setup(){
// LED (2 * blink)
pinMode(48, OUTPUT);
digitalWrite(48, HIGH);
delay(200);
digitalWrite(48, LOW);
delay(200);
digitalWrite(48, HIGH);
// Serial
Serial.begin(57600);
// Initialize Wire
LIS302_iniWire ();
// Append Sensor
Serial.print("AppendSensor ... ");
boolean success = LIS302_AppendSensor (); // +- 2g
// boolean success = LIS302_AppendSensor (true); // +- 8g
if (success == false)
Serial.println("ERROR while Appending Sensor. Perhaps sensor is connected wrong.");
else
Serial.println("done.");
// Uncomment this, if you want to define further configurations (usually not necessary)
// Config
// default: false, false, false, false, false, true, true, true
// boolean dataRate400Hz, boolean powerUp, boolean use8g, boolean enableSelfTestP, boolean enableSelfTestM, boolean enableZ, boolean enableY, boolean enableX
boolean powerup = true;
boolean use8g = false;
LIS302_ConfigR1 (false, powerup, use8g, false, false, true, true, true);
// default: false, false, false, false, false, 0
// boolean useSPI3WireMode, boolean rebootMemory, boolean enabledFilteredData, boolean enableFreeFallAndWakeUp02, boolean enableFreeFallAndWakeUp01, byte highPassFrequency
LIS302_ConfigR2 (false, false, false, false, false, 0);
// default: false, false, 0, 0
// boolean interruptActiveLow, boolean interreptOpenDrain, byte int2ControlBits, byte int1ControlBits
LIS302_ConfigR3 (false, false, 0, 0);
delay (100);
int val;
// Who am I?
val = LIS302_Read ('w');
Serial.print(" Who Am I: ");
Serial.print(val, HEX);
Serial.print(" (should be '3B')"); // should be 0x3B
Serial.println("");
// Config1
val = LIS302_Read ('a');
Serial.print(" Config1: ");
Serial.print(val, BIN);
Serial.print(" (default: 00000111)");
Serial.println("");
// Config2
val = LIS302_Read ('b');
Serial.print(" Config2: ");
Serial.print(val, BIN);
Serial.print(" (default: 00000000)");
Serial.println("");
// Config3
val = LIS302_Read ('c');
Serial.print(" Config3: ");
Serial.print(val, BIN);
Serial.print(" (default: 00000000)");
Serial.println("");
}
//
// Loop
void loop() {
// Mesure Acceleration
byte val_x = LIS302_Read ('x');
byte val_y = LIS302_Read ('y');
byte val_z = LIS302_Read ('z');
byte val_xg = LIS302_ParseToG (val_x);
byte val_yg = LIS302_ParseToG (val_y);
byte val_zg = LIS302_ParseToG (val_z);
Serial.print(" x: "); Serial.print(val_xg); Serial.print(" mG ("); Serial.print(val_x); Serial.print(")");
Serial.print(" y: "); Serial.print(val_yg); Serial.print(" mG ("); Serial.print(val_y); Serial.print(")");
Serial.print(" z: "); Serial.print(val_zg); Serial.print(" mG ("); Serial.print(val_z); Serial.print(")");
Serial.println("");
// Print state
byte state = LIS302_Read('s');
LIS302_PrintState(state);
Serial.println("");
// Delay
delay (100);
}